11 – Projeto por restrição exata
Os projetistas de mecanismos rotineiramente usam os princípios da cinemática, porque dispositivos super restringidos ou sub restringidos simplesmente não funcionam. O que o engenheiro de precisão deve ter em mente é que, em uma escala devida, tudo é um mecanismo. O componente que deve permanecer estável dentro de nanometros nunca permanecerá se for super restringido a uma estrutura que se deforma na ordem de grandeza de micrometros.
Essa é a principal motivação para a utilização de projeto cinemático ou projeto por restrição exata nas máquinas de precisão, que seja, isolar partes ou sistemas sensíveis, como um circuito de metrologia, da influência de componentes estruturais que alterem suas dimensões ou de tolerâncias de fabricação desses componentes. Da mesma forma, componentes se encaixarão perfeitamente e sem folga se estiverem exatamente restringidos como, por exemplo, os acoplamentos cinemáticos. Por isso que, quando se foge do projeto cinemático, resulta uma situação de acréscimo nos custos de fabricação.
O termo restrição exata é bastante explícito e explicativo, uma vez que o seu conceito básico é entendido. Um objeto rígido não restringido possui seis graus de liberdade, usualmente identificados como três translações e três rotações. Um objeto não rígido deverá possuir um ou mais graus de liberdade adicionais devido à sua flexibilidade. Por exemplo, uma caixa de sapatos aberta possui flexibilidade torcional, o que dá a ela sete graus de liberdade. A aplicação adequada de restrições eliminará os graus de liberdade não desejados um por um. Assim o principal objetivo da aplicação de restrição exata é permitir graus de liberdade desejáveis ou nenhum grau de liberdade aplicando-se o menor número de restrições possível. Uma restrição ideal é aquela que se apresenta absolutamente rígida contra graus de liberdade indesejáveis, e absolutamente livre nos demais graus de liberdade. Uma restrição real, como uma pequena área de contato entre superfícies, um acoplamento ou um mancal, fornece um ou mais graus de restrição que são muito mais rígidos do que os graus de liberdade, somente se aproximando do comportamento ideal.
Algumas conclusões básicas da aplicação de restrições contra graus de liberdade são facilmente obtidas. Por exemplo, para se resistir a uma translação, uma força é necessária enquanto que para se resistir a uma rotação, um momento ou duas forças iguais atuando como um par binário, são necessárias.
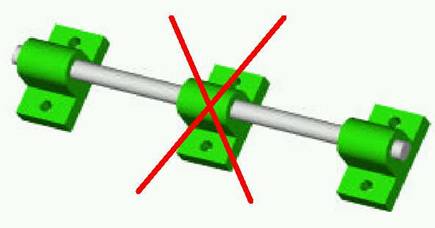
Como exemplo prático, um eixo não deve ser restringido por mais do que um mancal, como é mostrado na figura 29.
Figura 29 – Exemplo de super restrição de um eixo.
Na figura 30, um novo exemplo mostra um eixo apoiado por dois mancais de rolamento. No primeiro caso, o sistema está super restringido, enquanto que no segundo caso a restrição é feita de forma adequada. No caso super restringido, a restrição do eixo pode causar danos aos mancais de rolamento quando o sistema sofrer variações de temperatura, o que é muito comum pelo fato dos próprios mancais de rolamento, depois de bastante solicitados, gerarem muito calor por atrito.
![]()
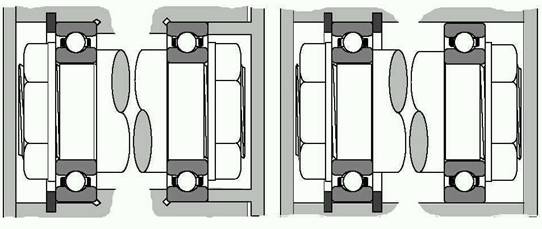
Figura 30 – Exemplos de um eixo super restringido e adequadamente restringido.
Os conceitos básicos de restrição exata podem ser introduzidos através da apresentação das regras propostas por Blanding, 1992. Embora essas regras tratem especificamente de restrições ideais, elas permitem um entendimento essencial de cinemática requerido para o projeto de sistemas com restrições reais. A idéia é que a apresentação dessas regras permita uma visualização e entendimento das técnicas básicas de cinemática, e não somente a aplicação direta de regras que podem ser facilmente esquecidas.
As regras são: