15.2 - Acionamentos Lineares
Acionamentos lineares são aqueles em que o padrão de deslocamento é de translação, não havendo a necessidade de se introduzir elementos para conversão de movimento como, por exemplo, fusos. Existem poucos elementos de acionamento linear para aplicações em máquinas-ferramenta, dos quais podemos citamos abaixo os principais (Stoeterau, 1999):
2.15.2.1 - Atuadores Hidráulicos/Pneumáticos
Os atuadores hidráulicos e pneumáticos apresentam como principal característica a capacidade de transmissão de elevadas forças, e seu uso em máquinas é bastante difundido. Apesar de pesquisas recentes já proporcionarem formas de controle de posição e velocidade em atuadores hidráulicos e pneumáticos, esses ainda encontram limitação quanto ao uso em máquinas-ferramenta, em função da dificuldade de controle de posicionamento. Contudo, para aplicações dedicadas, tais como torneamento e retificação longitudinal e faceamento, sua utilização é quase unânime em função da relação custo/benefício que oferecem (Weingaertner, 1992).
2.15.2.2 - Atuadores PIEZELÉTRICOS
O efeito piezelétrico é uma propriedade de determinados materiais de gerarem uma diferença de potencial elétrica quando submetidos a deformações ou vice-versa, como, por exemplo, em cristais de quartzo. Este efeito é amplamente explorado em transdutores de pressão, força e deformação.
Os atuadores piezelétricos têm ampla aplicação em sistemas que necessitem pequenos cursos de deslocamento e são muito usados no ajuste fino de ferramentas de corte em usinagem de ultraprecisão e na estabilização de sistemas ópticos.
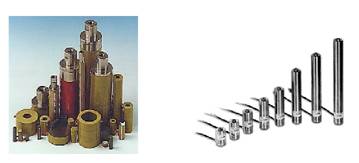
Quanto à forma, estes podem assumir o formato de discos, barras e cilindros (Slocun, 1992), sendo que a figura 48 apresenta acionamentos piezoelétricos de diversas configurações. Atualmente as cerâmicas piezelétricas têm substituído os cristais naturais, e podem ser sinterizadas de acordo com a forma que se deseja (Weck, 1992).
Figura 48 – Acionamentos piezelétricos
Motores lineares podem ser definidos como transdutores que transformam sinais elétricos em movimentos de translação. São projetados para executar movimento linear diretamente, sem a necessidade de acoplamentos mecânicos. Um motor linear pode ser mais bem descrito como um motor rotativo tradicional que é aberto e realiza um movimento em linha. Ao contrário dos motores rotativos, onde os parâmetros de referência são velocidade angular e torque, nos motores lineares as componentes do movimento são referenciadas como força e velocidade de translação. A força atua ao longo do deslocamento da componente estacionária, a qual é denominada de estator ou padrão, enquanto que o elemento móvel é referenciado como translator ou cursor (Vasquez, 1994; Weck, 1992; Krause, 2000).
Na prática, os motores lineares DC com escovas raramente são utilizados devido à sua deterioração mecânica (desgaste das escovas) e à conseqüente necessidade de manutenção. Os motores lineares assíncronos também não são utilizados, devido à sua dificuldade de controle.
As vantagens no emprego de motores lineares, em contraste com sistemas com atuadores e motores convencionais, podem ser assim resumidas:
Aplicações típicas:
Cabe salientar que em algumas situações esbarra-se na dificuldade de obtenção destes elementos, quer pelo custo elevado, quer pelas restrições impostas pelos países de origem (Vasquez, 1994; Weck, 1992; Krause, 2000).
2.15.2.4 - Outras Formas de Acionamentos Lineares
No campo da nanotecnologia, outras formas de acionamento linear podem ser consideradas:
ðMicrômetro manual – são bastantes difundidos e podem proporcionar uma solução de baixo custo para muitos problemas de acionamento de precisão para cursos curtos e médios (Smith-Chetwynd, 1994; Davidson, 1972; Krause, 2000).
ðEletroestricção – baseado em um efeito similar ao efeito piezoelétrico, as cerâmicas eletrorestrictivas operam com gradiente de campo para gerar a tensão, que pode ser conceituada como uma deformação resultante (Smith-Chetwynd, 1994, Krause, 2000).
ðRoda de atrito – existem três grupos distintos de rodas de atrito. Um baseado no travamento por atrito, outro baseado na inércia de um objeto para superar as forças de atrito e um terceiro que compreende uma forma híbrida dos dois primeiros (Smith-Chetwynd, 1994,Slocun, 1992; Mizumoto et. al., 1995).
ðMagnetoestricção – princípio muito similar ao piezoelétrico, contudo a deformação é causada pela presença de um campo magnético.
ðMagnetoelasticidade – baseia-se na capacidade que todos os materiais magnéticos têm para alterar seu módulo de elasticidade na presença de campos magnéticos uniformes (Smith-Chetwynd, 1994,Krause, 2000).
ðLigas de memória mecânica – algumas ligas, notadamente as de níquel e titânio, apresentam uma transformação de fase reversível entre a estrutura martensítica e austenítica, as quais têm propriedades elásticas muito diferentes (Smith-Chetwynd, 1994,98).
ðLigas bi-metálicas – princípio muito utilizado em disjuntores de segurança, baseado na união de dois materiais com diferentes coeficientes de dilatação térmica, sendo o deslocamento proporcional à variação de temperatura (Smith-Chetwynd, 1994).
ðEletro-magnético - os atuadores eletromagnéticos operam dentro do mesmo princípio dos solenóides com mola. Nestes a força é não-linear porém a facilidade de controle em malha aberta os torna atrativos para aplicações tais como travamento. Em aplicações que necessitem controle de posicionamento, estes não são aplicados (Smith-Chetwynd, 1994).
ðElestrostático – baseado no princípio da atração entre corpos com diferença de potencial (Smith-Chetwynd, 1994).
ðRelação de Poisson - baseada na teoria da elasticidade dos materiais onde é possível se obter deslocamento, resultante de deformações, em função da aplicação de pressão.